- +1
上海戰(zhàn)略所|立足數(shù)據(jù)驅動,加速構建人形機器人產(chǎn)業(yè)技術生態(tài)

當前,人形機器人產(chǎn)業(yè)已步入商業(yè)化落地的初級階段,產(chǎn)業(yè)技術從實驗室走向市場驗證,并形成數(shù)據(jù)驅動邏輯下的主流技術路徑。相關市場主體 “大而全”“小而全”的發(fā)展策略弊端日益凸顯,亟待轉變發(fā)展思路,強化前瞻性視野和戰(zhàn)略性思維,從技術、標準、資源、政策等多角度構建一體化產(chǎn)業(yè)技術生態(tài),以穩(wěn)健的技術生態(tài)優(yōu)勢應對不確定性,促進人形機器人產(chǎn)業(yè)健康發(fā)展。
一、商業(yè)化拐點將至,產(chǎn)業(yè)技術走向市場驗證
在技術和市場的雙重驅動下,人形機器人已開始步入商業(yè)化落地的初級階段,其相關技術也面臨從實驗室研發(fā)轉向產(chǎn)業(yè)化應用的關鍵轉型。
1. 人形機器人商業(yè)化落地加速
2024年已被業(yè)界普遍定義為“人形機器人商業(yè)化元年”,首屆中國人形機器人產(chǎn)業(yè)大會發(fā)布的《人形機器人產(chǎn)業(yè)研究報告》顯示,2024年中國人形機器人市場規(guī)模預計達到27.6億元,并有望在2030年成長為千億元市場。全球市場也顯示出強勁的增長動力,國際投資銀行高盛預測,到2035年人形機器人市場規(guī)模有望達到1540億美元。當前,原型產(chǎn)品正從模擬訓練進入場景實訓。工業(yè)制造和物流倉儲領域成為優(yōu)先突破場景,行業(yè)領軍企業(yè)已經(jīng)開始部署實訓。如特斯拉在美國俄勒岡州開設了機器人制造工廠“RoboFab”,并計劃在2025年交付部分Optimus產(chǎn)品。此外,零售服務、家庭服務、科研服務等領域也作為潛在市場開展特定場景應用。
2. 產(chǎn)業(yè)技術從實驗室走向市場驗證
得益于現(xiàn)代工業(yè)機器人的行業(yè)奠基,加之AI技術突破帶來的智能化滲透,人形機器人正加速樣機迭代,加速從簡單操作到復雜任務執(zhí)行、從單一功能到多功能集成的轉變。當前,國內(nèi)外龍頭企業(yè)紛紛加大人形機器人產(chǎn)業(yè)布局力度,相關技術正經(jīng)歷從實驗室研發(fā)向產(chǎn)業(yè)化應用的關鍵過渡。如特斯拉以控制軟件和算法為核心,構建AI生態(tài)并加快從智能汽車向人形機器人的移植;OpenAI以ChatGPT為核心,投資Figure AI和1X等通用人形機器人企業(yè);英偉達立足算力平臺與芯片,為波士頓動力、傅里葉智能、小鵬機器人等人形機器人企業(yè)提供模型算力支持;華為探索構建“華為賦能”和“華為智選”人形機器人生態(tài)。在機器人具身智能能力建設的進程中,需要突破結構、關節(jié)、運動、感知、認知和決策等多環(huán)節(jié)挑戰(zhàn),面臨技術可實現(xiàn)性、資源可獲得性、主體可協(xié)同性和成本可接納性等多重約束和考驗。
二、數(shù)據(jù)驅動漸成主流,技術路徑日益明朗
人形機器人產(chǎn)業(yè)技術的發(fā)展,既繼承了工業(yè)機器人相關技術,又在AI技術的推動下,展現(xiàn)出顛覆性創(chuàng)新態(tài)勢。在經(jīng)歷了多輪范式變遷與模式比選后,以數(shù)據(jù)為核心來構建產(chǎn)品或服務的運作邏輯漸成主流,并形成決策機制、系統(tǒng)架構和支撐資源三層次技術路徑。
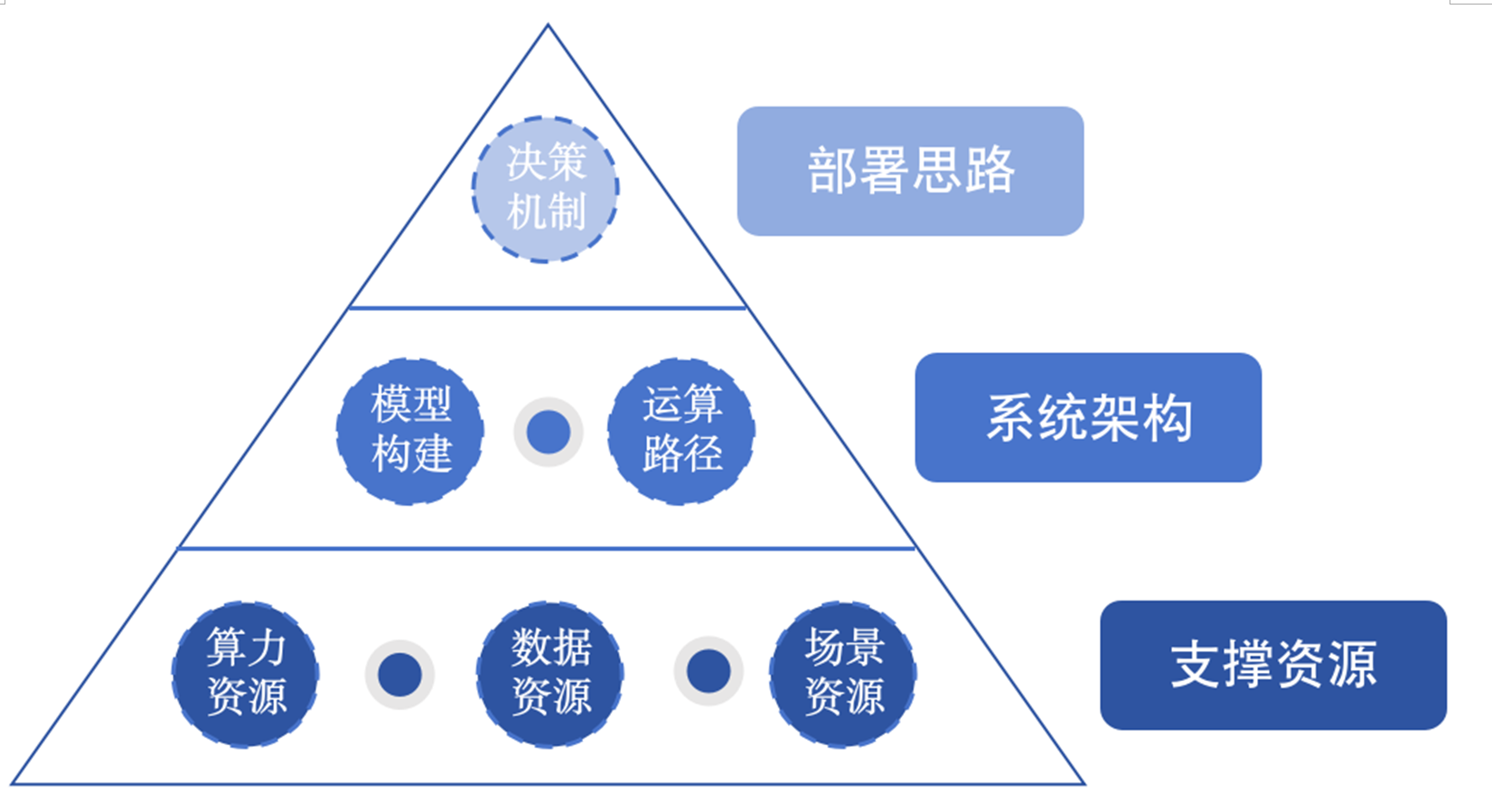
1. 部署思路:“自動”向“自主”的范式轉型
當前,智能系統(tǒng)的決策機制正逐步從規(guī)則驅動的“模塊化”走向數(shù)據(jù)驅動的“端到端”模式,進而促使智能化部署從“自動化的部件協(xié)同”升級為“自主化的整體行動”。
傳統(tǒng)智能決策機制是一種基于規(guī)則驅動的“模塊化”架構,即將感知、定位、決策、控制等任務拆分為多個獨立模塊,通過邏輯規(guī)則驅動功能實現(xiàn),通過接口傳遞完成工作協(xié)同。隨著深度學習技術的發(fā)展,基于數(shù)據(jù)驅動的“端到端(end to end)”架構開始出現(xiàn),其將智能系統(tǒng)視為一個整體,通過多模態(tài)的神經(jīng)網(wǎng)絡模型直接從輸入的傳感器數(shù)據(jù)生成最終的決策和控制信號。相對于“模塊化”架構,“端到端”架構更加貼近人類行為模式,可實現(xiàn)數(shù)據(jù)輸入到?jīng)Q策輸出的無縫銜接,不僅提高了系統(tǒng)的性能上限,還具備更強的泛化和復雜場景適應能力。其首先應用于自動駕駛領域,英偉達、特斯拉最先掀起“端到端”的自動駕駛變革,百度、華為和以“蔚小理”為代表的造車新勢力均開始布局“端到端”自動駕駛方案。鑒于該架構的高度可移植性,“端到端”架構在機器人導航和任務執(zhí)行中也開始逐步應用。例如,特斯拉的Optimus機器人和谷歌的RT-2項目均采用了“端到端”模型,實現(xiàn)了高效、靈活的多任務處理;Figure AI與OpenAI合作開發(fā)的Figure 01機器人也展示了“端到端”如何轉變機器人決策邏輯。在“端到端”架構日益成為業(yè)界共識的背景下,其核心能力儲備和掣肘因素破解也應及時提上日程。模型優(yōu)化、數(shù)據(jù)質(zhì)量、算法創(chuàng)新以及算力提升,這些共同構成了提升“端到端”技術成熟度的核心要素。同時,為了有效破除模型復雜度高、可解釋性差等挑戰(zhàn),對相關資源的深度挖掘與協(xié)同布局,需引起更多關注與切實行動。
2. 系統(tǒng)架構:“漸進”與“顛覆”的動態(tài)平衡
近年來,作為部署思路的核心載體,系統(tǒng)架構從萌芽走向成熟。其技術路徑主要分為兩類:即基于工業(yè)機器人的“漸進式改良”與基于生成式AI的“顛覆式創(chuàng)新”。伴隨技術供給和產(chǎn)業(yè)需求的深入磨合,路線之爭也逐漸從并駕齊驅走向動態(tài)平衡。
一方面,模型構建從“大小之爭”走向“通專結合”。長期以來,工業(yè)機器人領域通常采用小模型來滿足感知、運動、控制等特定任務的需求,這些小模型在硬件資源有限的機器人本體上運行,確保可靠性和穩(wěn)定性。然而,隨著AI大模型的發(fā)展,越來越多的廠商開始探索如何納入通用大模型和行業(yè)垂直大模型,更好地解決工業(yè)領域的特定問題。盡管如此,大模型當前存在的專業(yè)認知缺乏、算力資源不足、幻覺現(xiàn)象突出等問題,使其應用于工業(yè)領域仍面臨可靠性和成本等挑戰(zhàn),需要在“通用性”和“專業(yè)化”之間找到平衡點。
另一方面,運算路徑從“云端計算”走向“云邊結合”。傳統(tǒng)的機器人系統(tǒng)多依賴于云端計算,以利用強大的算力進行復雜任務處理。隨著邊緣計算技術的發(fā)展,越來越多的計算任務被轉移到邊緣設備上,以減少延遲并提高實時響應能力。例如,Meta、谷歌、高通、英偉達等都致力于推動邊緣AI發(fā)展,云邊協(xié)同架構也在車路運一體化的智能駕駛、智能倉庫巡檢機器人等領域開始被應用,以實現(xiàn)高效的數(shù)據(jù)處理、實時決策和系統(tǒng)優(yōu)化。
3. 支撐資源:“私有”與“公共”的互為滲透
人形機器人運行涉及軟硬件環(huán)節(jié)眾多,應用覆蓋廣泛,傳感、控制、執(zhí)行及人機交互等領域的功能實現(xiàn)都將依賴于大規(guī)模算力、數(shù)據(jù)及訓練場景支撐。盡管領軍企業(yè)已加大布局力度,但獨自承擔所有環(huán)節(jié)已不現(xiàn)實,未來必然趨向公共與私有部門攜手合作,共建共享資源體系。
一是算力資源從“個體部署”走向“集群共享”。傳統(tǒng)的分散自主部署算力模式存在周期長、高能耗、利用率低等諸多弊端,且當前面臨出口管制限制與國產(chǎn)替代緩慢等現(xiàn)實問題。面向算力需求的爆炸式增長和AI算力芯片的超短期迭代,算力建設也必將走向集約化和網(wǎng)絡化,實現(xiàn)算力、數(shù)據(jù)、算法等資源的流動共享。通過集群共享的方式,可以實現(xiàn)算力資源的高效復用和按需分配,從而顯著提升資源利用率,降低算力成本。同時,在集群形態(tài)上,算力網(wǎng)絡將成為主要的供給方式,通過連接分散的算力資源,實現(xiàn)多中心資源聚合和多元異構算力的融合。例如,英偉達算RiseVAST平臺通過虛擬化技術實現(xiàn)了異構算力集群的混合部署、統(tǒng)一調(diào)度和管理,支持多任務共享同一顯卡,從而提升硬件使用效率并降低算力成本。特斯拉的DOJO智算中心將實現(xiàn)100,000PFlops算力,相當于約30萬塊英偉達A100的算力總和。在這一大背景下,協(xié)同推進AI算力芯片產(chǎn)業(yè)的發(fā)展與智算集群的共建共享,是有效解決算力荒、算力弱、算力貴的關鍵突破口。
二是數(shù)據(jù)資源從“結構化”走向“非結構化”。隨著業(yè)務場景的改變,算據(jù)資源正在從基于數(shù)據(jù)庫的結構化數(shù)據(jù)向非結構化數(shù)據(jù)轉變。根據(jù)IDC的統(tǒng)計分析,文本、圖像、視頻等非結構化數(shù)據(jù)占整體數(shù)據(jù)量的比重高達80%以上,且以每年55%~65%的速度增長。同時,生成式AI技術的發(fā)展也推動了非結構化數(shù)據(jù)的應用,使得基于非結構化數(shù)據(jù)進行模型調(diào)優(yōu)和決策支持成為可能。例如,亞馬遜已開始通過Textract等工具處理大量非結構化文本數(shù)據(jù),以支持其云服務和數(shù)據(jù)分析需求;IBM的Watson人工智能平臺,正在通過自然語言處理和機器學習技術,將結構化和非結構化數(shù)據(jù)轉化為有價值的洞察。這意味著,未來應用于人形機器人的AI推理和訓練算據(jù)很大程度上將以非結構化數(shù)據(jù)為主,并基于其輔助AI算法優(yōu)化,這要求相關部門在推動非結構化數(shù)據(jù)源的整合、促進技術創(chuàng)新應用及完善多源數(shù)據(jù)治理體系等方面加強前瞻性部署。
三是場景資源從“實體訓練”走向“虛實融合”。早期的人工智能訓練場景以實地為主,存在時空受限、成本高昂、環(huán)境單一、安全風險等弊端。虛擬環(huán)境訓練的引入,顯著提升了訓練效率和降低訓練成本,并緩解了AI算力短缺和真實訓練數(shù)據(jù)缺乏問題。例如,英偉達的Omniverse軟件實現(xiàn)了虛擬世界的物理級仿真和渲染,并在Omniverse基礎模型之上,研發(fā)出Isaac專用模擬訓練機器人研發(fā)平臺。再比如,由卡內(nèi)基大學、斯坦福大學等近20家全球頂尖高校實驗室聯(lián)合研發(fā)的生成式物理引擎Genesis,通過綜合性物理仿真平臺自動生成多場景物理模擬,為機器人虛擬環(huán)境訓練提供強大支持。此外,特斯拉通過構建虛擬仿真空間和快速標注技術,為規(guī)控算法的訓練與驗證提供高自由度的環(huán)境。這些技術的應用表明,虛擬環(huán)境訓練將是未來的重要趨勢之一,相關部門需要在訓練階段定義、場景分級認證、倫理和合規(guī)性認定等方面加快前期部署。
三、分散競爭弊端顯現(xiàn),一體化生態(tài)亟待先行
隨著科研與產(chǎn)業(yè)界的深入合作,上述技術路徑已逐步從實驗室階段邁向中等規(guī)模的實際場景驗證,這一進展無疑為人形機器人的產(chǎn)業(yè)化進程注入積極信號。但也應看到,當前相關市場主體仍處于“春秋戰(zhàn)國”的分散競爭格局中(注:國家地方共建人形機器人創(chuàng)新中心統(tǒng)計,截至2024年11月,國內(nèi)外通用人形機器人整機商業(yè)公司約150家,國內(nèi)超過80家,國內(nèi)的人形機器人整機商業(yè)公司中有半數(shù)來自高校的學生和教師創(chuàng)業(yè)。),尚未就產(chǎn)品定義、產(chǎn)業(yè)構成及行業(yè)標準達成共識,對于產(chǎn)業(yè)鏈、供應鏈以及創(chuàng)新鏈之間的協(xié)同路徑,也缺乏明確的認識。這種狀況極易導致各主體采取“大而全”“小而全”的發(fā)展策略,不僅增加了產(chǎn)業(yè)化進程中的不確定性,還可能導致重復投資與重復建設,造成資源浪費,相關各方只有共同認識到問題所在,方能有效破局。
1. 軟硬件標準尚不統(tǒng)一,系統(tǒng)銜接與供應鏈搭建面臨較多堵點
盡管當前已有近百家企業(yè)參與人形機器人產(chǎn)業(yè),但軟硬件技術仍面臨快速迭代和選型之爭,標準尚未統(tǒng)一,導致供應鏈效率低下和成本增加。
一是軟硬件標準化問題。人形機器人的核心硬件多數(shù)處于從發(fā)展期到成熟期的過渡階段,而腦機接口等更先進的技術則剛從萌芽期過渡到發(fā)展期,硬件層面仍存在較多痛點,并導致供應鏈上游操作系統(tǒng)和工業(yè)控制PLC面臨部件、質(zhì)量要求等不統(tǒng)一,不利于形成規(guī)模和成本控制。
二是“云邊端”一體化問題。新型運算模式?jīng)Q定了云邊協(xié)同面臨著數(shù)據(jù)安全與隱私保護、網(wǎng)絡拓撲的動態(tài)變化以及設備異構性等問題,需要優(yōu)化計算任務分配機制和安全體系等來提升整體效能。同時,不同行業(yè)對邊緣計算部署的要求各不相同,導致開放接口、數(shù)據(jù)格式、傳輸協(xié)議等方面存在較大差異,亟待建立面向共性領域的統(tǒng)一方案和針對細分領域的標準參照,以減少大量重復驗證和適配成本。
2. 模型進展差異較大,協(xié)調(diào)成本和協(xié)同缺口較大
適配人形機器人的通用大模型基礎仍處于早期階段,小模型雖然具備工業(yè)機器人領域的技術積淀,但面向運動協(xié)調(diào)和復雜場景的性能要求上仍具有較大差距,大小模型、新舊體系之間的協(xié)調(diào)成本和協(xié)同缺口仍然較大。
一是大模型瓶頸仍未有效突破。目前,國內(nèi)大模型研發(fā)為人形機器人的感知、決策和交互能力提供了一定技術支撐,但底層架構和算法框架仍大多依賴國外技術,其高昂的成本、較低的可靠度、薄弱的泛化能力和尚未成熟的產(chǎn)業(yè)鏈,對商業(yè)化落地造成一定阻礙。同時,“百模大戰(zhàn)”催生無序競爭不僅浪費了大量資源,還可能引發(fā)行業(yè)內(nèi)的惡性競爭。
二是小模型性能提升面臨限制。小模型精度和可靠性更高,但缺少真實的理解力,在處理復雜任務時仍難以達到人形機器人運動所需要的性能。此外,針對特定應用場景的定制化開發(fā),還面臨數(shù)據(jù)稀缺、標注質(zhì)量和算力受限等問題,尤其是在某些專業(yè)領域,低通用性與高開發(fā)成本的矛盾已日益突出。
3. 計算資源協(xié)同不足,數(shù)據(jù)和算法共享困境突出
人形機器人需要處理復雜的感知、決策和運動控制任務,這些任務對計算資源的要求非常高。面向數(shù)據(jù)與算力的集群布局,產(chǎn)業(yè)界和政府部門都在著手推進,但共建共享面臨的技術與制度瓶頸依然較為突出。
一是數(shù)據(jù)共享和流通面臨障礙。人形機器人市場化落地需要大規(guī)模高質(zhì)量數(shù)據(jù)供給,但由于數(shù)據(jù)產(chǎn)權界定仍不明確,分級分類的數(shù)據(jù)使用規(guī)則和安全機制仍不明晰,導致數(shù)據(jù)共享與流通的規(guī)則仍然相對缺失。數(shù)據(jù)用戶不得不采用大量人力進行數(shù)據(jù)采集,這不僅成本高昂,而且效率低下。
二是算力資源管理模式有待變革。隨著大模型的發(fā)展,對算力的需求呈指數(shù)級增長,但智算中心的利用率卻極為有限,調(diào)查顯示智算中心機房出租率普遍僅有20%~30%之間,暴露出行業(yè)的結構性問題。一方面,國內(nèi)算力和智算中心在高速發(fā)展的同時,技術選型和系統(tǒng)架構滯后問題卻較為突出,高級算力涉及的網(wǎng)絡架構、任務調(diào)度及智能運維等能力并沒有同步增長。另一方面,使用端尚未完全理解大模型訓練深層次需求,簡單的“堆卡”行為不足以應對實際算力要求。這種供需錯配導致了智算中心過剩與大模型算力緊缺的矛盾,需要從頂層設計、技術路徑和協(xié)作模式等多方面入手,推動算力資源的有效配置和高效利用。
4. 跨界合作面臨挑戰(zhàn),場景分散與行業(yè)割裂較為突出
目前,人形機器人尚未在下游終端應用領域實現(xiàn)規(guī)模化商業(yè)落地,部分核心零部件在人形機器人領域的應用也未得到充分驗證。主要原因是人形機器人行業(yè)應用中仍面臨路線分歧和場景割裂的問題。
一是場景分散,難以支撐應用規(guī)模。人形機器人在商業(yè)化場景的開發(fā)應用上還處于探索階段,小規(guī)模應用難以達到投入產(chǎn)出效能指標,大規(guī)模應用如工業(yè)場景則面臨穩(wěn)定性、可靠性的多重挑戰(zhàn)。上述情況,不僅限制了人形機器人的技術迭代和性能提升,反過來進一步限制了其需求剛性和商業(yè)化進程。
二是行業(yè)割裂,跨界合作創(chuàng)新渠道不暢。人形機器人主機廠商在行業(yè)推廣中仍面臨諸多挑戰(zhàn)。一方面,由于商業(yè)化合作機制不完善,導致資源與場景的互聯(lián)互通難以實現(xiàn)。另一方面,由于相關領域法規(guī)仍不健全,企業(yè)在虛擬訓練和場景共享等方面仍面臨“法無明確不敢為”的困境,導致合規(guī)成本過高。
四、統(tǒng)籌部署技術生態(tài),巧筑優(yōu)勢應對變局
盡管競爭態(tài)勢激烈,但總體而言,人形機器人產(chǎn)業(yè)的技術生態(tài)仍處于初創(chuàng)期,亟待市場配置資源的決定性作用與更好發(fā)揮政府作用的深度融合。面對市場的不確定性,積極強化人形機器人產(chǎn)業(yè)技術生態(tài)的科學布局,是搶占行業(yè)領先地位、優(yōu)化市場利益結構和捍衛(wèi)國家產(chǎn)業(yè)安全的應有之舉。預見技術演進趨勢,洞察產(chǎn)業(yè)配置邏輯,
1. 立足關鍵定義,加強國際標準輸出
一是順應技術路徑演進趨勢,推進標準路線圖匹配。基于數(shù)據(jù)驅動邏輯下的人形機器人技術演進趨勢,積極整合電子電氣、自動化控制、人工智能等多個學科領域的專業(yè)學會力量,組建跨學科專題研究小組,加快制定面向未來的人形機器人標準路線圖,分析識別關鍵領域的標準空白點并針對性地提出標準預研方案。強化與國際相關領域標準化機構協(xié)作,提升在國際標準制定中的影響力和引領性。
二是聚焦功能、智能、性能,強化軟硬件標準布局。當前,國家有關部委針對人形機器人領域已經(jīng)啟動了基礎標準計劃,并著手構建具身智能的標準體系。在此基礎上,需充分利用國家與地方共建的人形機器人創(chuàng)新中心以及本市標準化協(xié)會的資源優(yōu)勢,聚焦功能特性、智能水平及性能指標等核心要素,進一步深化垂直行業(yè)內(nèi)軟硬件標準體系的布局。同時,積極向國際標準化組織提議設立新的人形機器人技術標準委員會,旨在加速人形機器人通用標準的國際化進程和輸出能力,為整合產(chǎn)業(yè)鏈優(yōu)勢奠定發(fā)展基礎。
2. 立足漸進迭代,推動系統(tǒng)架構轉型
一是推進工業(yè)機器人與人形機器人技術路徑融合。應超越技術路線之爭,充分利用各自在形態(tài)結構、運動控制和應用場景方面的獨特優(yōu)勢,整合工業(yè)機器人標準化、穩(wěn)定性特點和人形機器人通用性、泛化性能力,通過技術融合實現(xiàn)互補發(fā)展。積極鼓勵并支持工業(yè)機器人與人形機器人領域的領軍企業(yè)組建創(chuàng)新聯(lián)合體,強化關鍵技術研發(fā)與核心產(chǎn)品創(chuàng)新的協(xié)同合作,加快形成完整的產(chǎn)業(yè)鏈和創(chuàng)新鏈。
二是強化“大、小”“云、端”協(xié)同部署。立足《人形機器人創(chuàng)新發(fā)展指導意見》提出的打造“大腦”和“小腦”的目標,推動系統(tǒng)架構協(xié)同部署。通過推動人工智能、信息通信、計算服務相關機構聯(lián)合研發(fā),優(yōu)化模型架構銜接、深化端云協(xié)同部署,推動大模型和小模型走“通專結合”發(fā)展道路。進一步強化人工智能研發(fā)機構與產(chǎn)業(yè)界的緊密合作,共同挖掘并創(chuàng)建通專融合技術在多元領域的應用場景潛力,鼓勵各方根據(jù)市場需求及自身核心競爭力,靈活選擇并推動示范性商業(yè)模式落地。
3. 立足融合共享,創(chuàng)新資源配置模式
一是積極發(fā)展虛實融合訓練場景體系。技術端方面,應強化多模態(tài)數(shù)據(jù)標準、訓練系統(tǒng)和深度強化學習技術的融合,開發(fā)基于云平臺虛實融合測試系統(tǒng),構建相關數(shù)據(jù)交互協(xié)議,提升生成復雜場景的能力。產(chǎn)業(yè)端方面,應同步構建虛實融合測試標準體系和政策體系,推動新型研發(fā)機構和公共技術平臺加大虛實結合測試場景的的多元化開發(fā)。
二是推動智算集群集約化協(xié)同化建設。順應通用型人工智能應用態(tài)勢,適度超前布局超算智算基礎設施,注重芯片、服務器、操作系統(tǒng)等關鍵算力部件的國產(chǎn)化替代,構建基于異構計算架構的自主軟硬件生態(tài)。同時,聚焦產(chǎn)業(yè)鏈區(qū)域化布局,推動長三角地區(qū)數(shù)據(jù)中心一體化布局和算力跨區(qū)域調(diào)度,加快構建“產(chǎn)算協(xié)同、數(shù)算融合、跨域輻射”的集約化智算公共網(wǎng)絡。
4. 立足聯(lián)動賦能,構建產(chǎn)業(yè)飛輪范式
一是推動技術產(chǎn)業(yè)化合作創(chuàng)新,構建產(chǎn)業(yè)飛輪原動力。重點圍繞人工智能、深度學習、視覺傳感、空間智能等核心技術,進一步發(fā)揮政府對基礎研究和技術創(chuàng)新的支撐作用,以專項基金、產(chǎn)業(yè)基金等方式支持產(chǎn)學研聯(lián)合研究項目開展,強化各方在市場需求、行業(yè)數(shù)據(jù)、AI模型、AI算力、傳感器、電控單元、系統(tǒng)總成等領域的優(yōu)勢,集中共建產(chǎn)業(yè)鏈生態(tài)。
二是推動場景協(xié)同開發(fā)和拓展,構建產(chǎn)業(yè)飛輪自驅力。進一步發(fā)揮政府在工業(yè)、醫(yī)療健康、交通物流、社會服務等行業(yè)的信息集成和轉型促進職能,建立常態(tài)化、多通道供需對接平臺,探索構建政務服務、城市治理領域應用場景率先開放機制,鼓勵人形機器人相關新模式、新服務和新業(yè)態(tài)孕育。
三是推動基于要素的扶持政策,形成產(chǎn)業(yè)飛輪補給力。突破傳統(tǒng)分行業(yè)管理模式,聚焦數(shù)據(jù)、技術、人才、標準等關鍵要素,立足產(chǎn)業(yè)鏈上下游聯(lián)動賦能,推動數(shù)據(jù)流動集成、共性技術開發(fā)、科學設施裝置、開源模型系統(tǒng)、虛實融合場景、復合人才認定等一攬子配套政策,推動技術生態(tài)要素的可持續(xù)供給。
(作者徐珺系上海發(fā)展戰(zhàn)略研究所副所長,正高級工程師)



- 報料熱線: 021-962866
- 報料郵箱: news@thepaper.cn
互聯(lián)網(wǎng)新聞信息服務許可證:31120170006
增值電信業(yè)務經(jīng)營許可證:滬B2-2017116
? 2014-2025 上海東方報業(yè)有限公司