- +1
光學精密工程·封面 | 光纖傳感:穿刺針形狀動態跟蹤
▍研究現狀
穿刺活檢是癌癥診斷的金標準,但手術過程的不可見性及穿刺針-組織交互作用引起的針體形變等因素,導致醫生徒手穿刺操作難度大、準確性低,穿刺針無法精準到達病灶靶點甚至損傷周圍重要組織。
近年來,穿刺機器人技術迅速發展,因具有穩定性高、可視化、自動化等特點,在經皮穿刺手術中表現出巨大潛力。穿刺機器人可通過術前路徑規劃避開重要組織,并融合醫學成像或光定位導航技術實現術中針尖位置的實時跟蹤。
然而,基于醫學圖像的穿刺針跟蹤方法在形狀監測實時性、準確性及其與醫療器械的兼容性等方面存在較大局限,影響了穿刺機器人在手術過程中自主避障及靶點操作的精準性。
因此,探究新的穿刺針形狀感知方法,為手術機器人自主/主從穿刺提供實時準確的形狀信息反饋,對于減輕醫療人員的手術壓力,提高穿刺手術的安全性與成功率有著重大意義。
▍關鍵技術突破或解決問題描述
針對這一應用需求,近期武漢理工大學李天梁教授團隊在《光學 精密工程》(EI、Scopus收錄,中文核心期刊,《儀器儀表領域高質量科技期刊分級目錄》和《光學和光學工程領域高質量科技期刊分級目錄》“T1級”期刊)上發表了題為“光纖光柵與人工智能融合的形狀自感知穿刺針”的封面文章。
2023年第2期封面
▍空分/波分混合復用的光纖光柵形狀自感知穿刺針構型
本研究充分發揮光纖傳感器抗電磁干擾、生物兼容及易于分布式測量等優勢,針對穿刺活檢術中穿刺針實時位置跟蹤難題,設計了一種光纖光柵形狀自感知穿刺針,其具體結構如圖1所示,構建了光纖光柵空分/波分混合復用傳感網絡,實現穿刺針多點位變形信息分布式感知。

圖1:形狀自感知智能穿刺針結構示意圖
▍基于BP神經網絡的穿刺針三維形態實時精準重構模型
針對目前術中穿刺針三維形狀監測方法存在的實時性、準確性不足等問題,本研究設計并搭建了光纖光柵形狀自感知穿刺針標定實驗系統,構建了神經網絡數據集,仿真分析神經網絡模型結構參量對其輸出性能的影響規律,確定了基于BP神經網絡的穿刺針三維形態實時精準重構最優構型,如圖2(a)所示,測試樣本輸出結果分析如圖2(b)所示,形狀誤差最大值為0.90mm,彎曲方向角最大誤差為5.03°。為進一步驗證模型的實時輸出性能,搭建了動態性能驗證實驗平臺,如圖3所示,針尖處重構相對誤差小于0.84 mm,彎曲方向角最大誤差為1.02°。上述結果表明本次研究構建的神經網絡模型具有較好的形狀重構精度和速度。
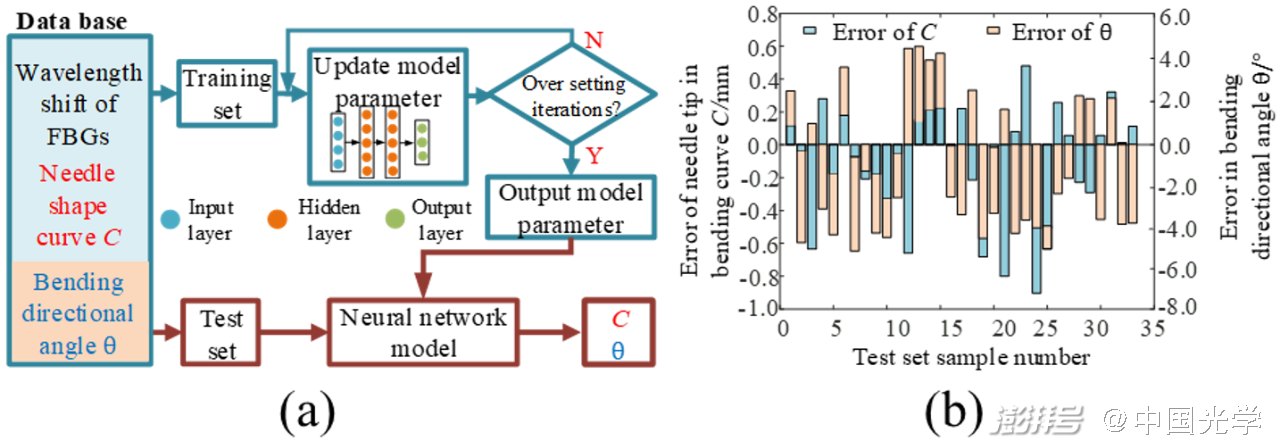
圖2:基于BP神經網絡的穿刺針三維形態實時精準重構模型

圖3:動態性能驗證實驗平臺及其實驗結果分析
▍應用前景
該研究集合了光纖傳感與神經網絡的優勢,實現了術中穿刺針三維形態信息的實時精準獲取,在手術機器人自主穿刺/主從操作過程中針體形狀感知與調控方面具有廣闊的應用前景,為實現穿刺機器人智能化、高效化和數字化提供了一種新方法。
| 論文信息 |
李天梁,宋珍珍,陳發銀等.光纖光柵與人工智能融合的形狀自感知穿刺針[J].光學精密工程,2023,31(02):160-167. DOI:10.37188/OPE.20233102.0160.
https://ope.lightpublishing.cn/thesis/65/33378376/zh/
| 團隊負責人簡介 |

李天梁,武漢理工大學教授、博士生導師,入選湖北省海外高層次創新人才、湖北省“楚天學者計劃”。IEEE Senior member,機械工程學會高級會員。聚焦于先進光纖傳感技術、醫療機器人、機械裝備動態監測等方面的研究。主持國家重點研發計劃課題、國家自然科學基金(青年,面上)、湖北省重點研發計劃、中國電子學會-騰訊Robotics X犀牛鳥等項目。在 Nat. Commun.、Adv. Intell. Syst.、IEEE-ASME. T. Mech.、《機械工程學報》等高質量期刊與學術會議上發表論文60余篇,其中第一作/通訊作者SCI論文35篇。指導學生獲第四屆中國研究生機器人創新設計大賽全國三等獎、第十七屆中國研究生電子設計競賽全國二等獎。
| 團隊介紹 |

武漢理工大學李天梁教授團隊聚焦于復雜機電裝備運行狀態光纖復合感知與動態監測技術及其應用方面的研究,主要包括適應嚴苛條件的極限化參數光纖傳感器設計與制備、多參數光纖復合感知與動態解耦測量、融合光纖分布感知的智能醫療機器人與穿戴式醫療設備研發等,承擔過國家重點研發課題、國家自然科學基金、湖北省重點研發計劃等項目。
▍參考資料
1. 王漢萍,張力,梁智勇. 正確看待細胞病理學在肺癌診斷中的意義[J].中華病理學雜志,2013, 42(11): 726-728.
2. KOETHE Y, XU S, VELUSAMY G, et al. Accuracy and efficacy of percutaneous biopsy and ablation using robotic assistance under computed tomography guidance: a phantom study[J]. European Radiology, 2014, 24(3): 723-730.
3. 孔祥戰.顱頜面穿刺診療手術機器人關鍵技術研究[D]. 北京:北京理工大學,2015.
4. 趙士元,崔繼文,陳勐勐. 光纖形狀傳感技術綜述[J]. 光學 精密工程,2020, 28(1):10-29.
5. 張貫一. 鎖骨下靜脈穿刺機器人及穿刺力模型研究[D]. 哈爾濱:哈爾濱理工大學,2019.
6. LI M, LI G, GONENC B, et al. Towards human-controlled, real-time shape sensing based flexible needle steering for MRI-guided percutaneous therapies[J]. The International Journal of Medical Robotics and Computer Assisted Surgery, 2017, 13(2): e1762.
7. 李勐. 穿刺手術機器人穿刺針-軟組織交互機理、規劃控制及感知技術研究[D]. 北京: 北京理工大學,2017.
8. HENKEN K R, DANKELMAN J, VAN DEN DOBBELSTEEN J J, et al. Error analysis of FBG-based shape sensors for medical needle tracking[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(5): 1523-1531.
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2025 上海东方报业有限公司