- +1
一只皮卡丘蹦到馬路中央,自動駕駛能認出它么?
原創 睿悅 果殼
自動駕駛的歷史中曾出現過這么一則奇怪的事故:2016 年美國佛州的高速公路上,司機約書亞 · 布朗開啟特斯拉自動駕駛(Autopilot)模式,接著雙手離開方向盤。
在一個路口,一輛白色卡車向左拐彎,正巧遇上布朗駕乘的特斯拉。

天空下的白色卡車|pixabay
據當時的目擊者稱,當白色卡車出現在面前時,布朗的特斯拉依然全速行駛,并徑直撞上卡車的底部。調查顯示,當時特斯拉的時速是每小時 119 公里。
布朗當場死亡。
但特斯拉依舊繼續行駛,并逐漸偏離道路,直到撞上兩個圍欄,以及一根電線桿后,才停下。
事故示意圖|Wikimedia Commons by Jzh2074
官方對這場事故的解釋是:“無論是自動駕駛儀,還是駕駛員,都沒有注意到拖車白色的一面映襯著明亮的天空,所以沒有剎車。”也就是說,自動駕駛將陽光下的白色貨車,認成了天空。
而這之后的五年里,又有至少三輛特斯拉,朝著白色卡車全速沖去——似乎自動駕駛依然無法分辨白色的巨物與發光的天空。
在自動駕駛的眼睛里,世界總是不太一樣。
自動駕駛怎么看世界?
自動駕駛的眼睛主要由毫米波雷達、激光雷達和攝像頭等傳感器擔任。
毫米波雷達利用電磁波的反射,測量物體的距離、速度等物理信息。它的抗干擾能力強,探測距離遠,適合在雨雪風沙等惡劣的天氣下使用。它還可以隱藏式安裝,不影響車輛的整體外觀。但它無法測量高度,世界在它眼里是扁平的。
購物平臺上的毫米波雷達|淘寶截圖
激光雷達則可以看到 3D 的世界,與毫米波雷達類似,激光雷達也是通過發送脈沖—接受反射的方式計算物體的距離、速度等信息。但因為激光是以光速傳播,它的測量會更加精準。激光雷達每秒發出數千個脈沖,通過計算不同角度的反射光波,激光雷達可以還原出目標物體的三維立體圖像。

激光雷達掃描示意圖|Wikimedia Commons
但想知道眼睛里的東西是什么,還是要交給攝像頭。在算法的加持下,攝像頭可以識別出前面的是人、動物還是建筑,不過,依舊是以 2D 的形式,像是看照片那樣。
目前主流的識別方案是多傳感器融合,像國內某些代表性車型,會擁有 5 個高精毫米波雷達,13 個車外攝像頭和 1 個車內攝像頭。
而特斯拉則堅持只用使用攝像頭(在最新的更新中,特斯拉甚至放棄了車上最基礎的超聲波雷達,真的實現了全車無雷達純視覺),理由是擔心雷達和攝像頭感知不一致時,汽車會不知道該相信誰。但更基礎的理由是:一,純攝像頭方案成本更低;二,算法的突飛猛進的確能夠彌補攝像頭相比雷達的劣勢。

特斯拉車內顯示|unsplash
但不管哪種路線最終勝出,傳感器都只能看見,要理解這些“看見”意味著什么,還是要靠感知算法。搭配不同傳感器傳來的信息,目前的算法可以知道汽車所處的位置和道路的模樣,理解交通信號燈,追蹤路上不斷出現的障礙物,還可以讀懂路標上的文字。
“老實的自動駕駛,已經勝過新手司機”,一定程度上的確如此。
當馬路中央蹦出一只皮卡丘
但當一只皮卡丘蹦到馬路中央時,自動駕駛一定是懵的。

當一只皮卡丘蹦到馬路中央|Giphy
這種“罕見又突發”的意外情況,在自動駕駛行業中被稱為邊角案例(corner case, CC)。這是來自是系統測試中的一個術語,原意指出現多個參數都在極端情況下的情形。文章開頭的事故,就是一例典型的 CC。
CC 通常被分為五個層次,對應著自動駕駛認知意外的不同復雜情況:某個像素點不清晰;場景從“習慣”切換成“不習慣”;出現不知名物體(但位置和目標清晰);位置和目標也不明確;直至目標、場景、環境的全面“意外”。
但任何一個小型 CC,都可能造成嚴重的后果。
大馬路上出現一只可愛的黃毛電氣老鼠,就是一種“未知物體”層面的 CC,識別失敗的后果要么是你遭受十萬伏特電擊,要么是被精靈訓練師爆錘。而真實世界中可能發生的事情只會更糟,沃爾沃的澳大利亞技術經理在2017年曾爆料,自家公司的自動駕駛不認識袋鼠。

袋鼠:“你不認識我”?|Giphy
“汽車通過利用地面作為參考點來探測動物,以確定物體的距離”,這位技術經理說,但當袋鼠蹦蹦跳跳地穿行在公路上,蹦在空中時,自動駕駛會將它識別成一件天空中的物體,判定它的距離比實際遠很多;而當袋鼠落地,自動駕駛又會將它識別得比實際距離近一些。

自動駕駛難以識別袋鼠的蹦跳|Giphy
我們可以想象一個澳大利亞的沿海公路上,幾只歡快跳躍的肌肉袋鼠旁,一輛自動駕駛汽車不知所措地面對著眼中這忽大忽小忽遠忽近的不明物體,停也不是,走也不是。
想想都替它感到害怕。
一只激光筆干翻自動駕駛
下圖可見,目前主流的傳感器皆有其短板,都可造成對道路情況判斷的不準確。
_
辨別3D信息
易干擾
直接測速
探測范圍
毫米波雷達
否
否
是
15-250m
激光雷達
是
是
是
小于300m
攝像頭
借助軟件可實現
是
否
大于500m
在傳感器的局限下,算法變得很容易被“欺騙”。
曾有人實驗過,將一束普通的激光照射在有軌電車上,自動駕駛就會把電車認作青蛙;當激光照射在海龜身上,海龜在自動駕駛眼中就成了水母;如果激光再變換一下顏色,它還會把一條蛇,依次識別為襪子、麥克風、菠蘿蜜、玉米,或熱狗腸。

激光變顏色,蛇就變形態|參考文獻 [1]
有自動駕駛的安全專家分析,這可能是因為算法將激光束的顏色也辨認為原有物體的一部分,比如當波長為 400nm 的激光束照射在“刺猬”上時,刺猬的刺與激光束引入的紫色結合后,會被算法最終辨認為“刺苞菜薊”。
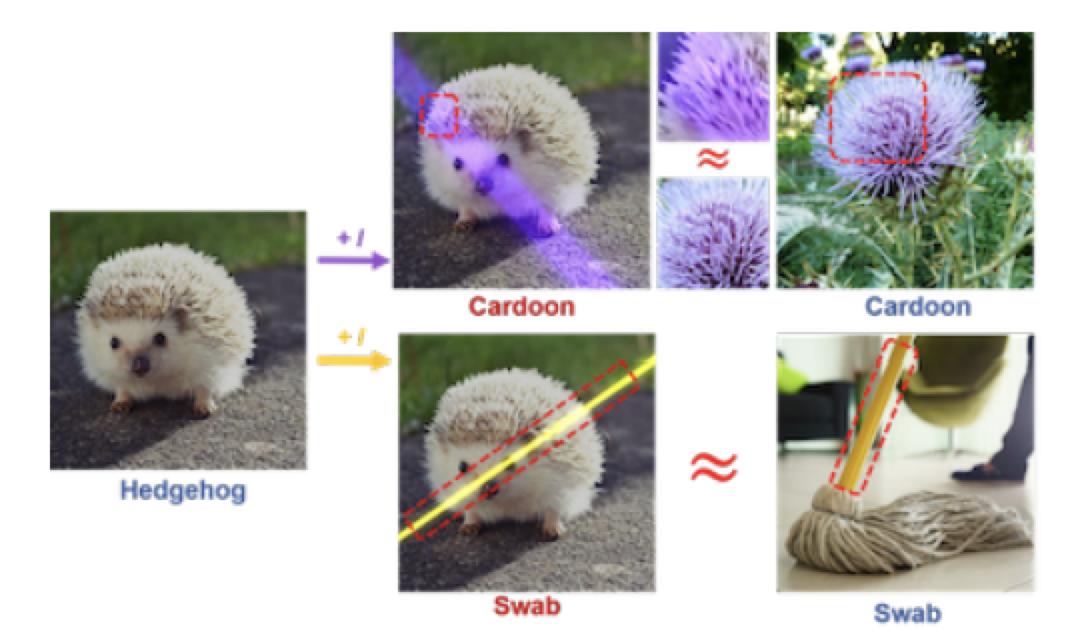
激光下,刺猬變刺苞菜薊|參考文獻 [1]
如此迷惑算法的成功率很高,在室內和室外的測試中,成功率可以分別達到 100% 和 77.43%。而這樣的激光筆,二三十塊錢就能買到一只。
另一個 CC 產生的重要原因,來自于目前圖像識別數據的無法窮舉。圖像識別的訓練方法主要是人類塞資料,機器記憶和歸類。算法像一個記憶力超群的小孩,可以記住塞入的任何資料和場景,但它尚不是成熟變通的高手,交通標示牌上黏了片樹葉、攝像頭上趴了只昆蟲、都有可能讓算法輸出截然不同的結果。
為什么CC這么重要?
自動駕駛領域用“二八定律”形容解決 CC 問題的重要程度——要花 80% 的時間,才能解決這看似“罕見”的 20% 問題——他們說,這是通向真正意義上自動駕駛的必經之路。
精確識別 CC,正確處理 CC,這其實是安全和效率(或者說駕駛體驗)平衡的問題。人們都是期待自動駕駛的絕對安全,卻也沒有人愿意接受每小時五公里還時不時頻繁剎車的自動駕駛交通體驗(況且低速與剎車同樣會帶來安全問題)。

沒有人愿意接受頻繁剎車的自動駕駛體驗|Giphy
自動駕駛的危險和普及障礙不但來自于“有,但認不出”,也會來自“無,但誤判了”。特斯拉曾經的“幽靈剎車”事件就是一個典型。
一名特斯拉車主在舊金山行駛時,路上飄著只塑料袋。“突然,汽車好像鎖住了”,這名車主回憶,它的特斯拉從大約 40 公里每小時,突然自動減速到 24 公里每小時,“但它立刻松開,因為塑料袋移開了“。

公路上常見的塑料袋也會影響自動駕駛|Wikimedia Commons by Ivan Radic
這名車主還比較幸運,至少他的車沒有在舊金山車來車往的公路上突然剎車。2022 年 2 月至 6 月,美國國家公路交通安全管理局共收到了 404 起關于特斯拉莫名突然剎車的投訴。車主們用“幽靈剎車”形容這種遭遇——在沒有危險情況發生時,開啟自動駕駛輔助模式的特斯拉突然剎車或減速,這會提升追尾事故的風險。
美國卡內基梅隆大學專注于自動駕駛汽車安全方向研究的教授菲爾·庫普曼分析,這或許是特斯拉的開發人員沒能正確設定汽車的決策閾值導致,特別是特斯拉的信息識別幾乎只依賴攝像頭,而沒有雷達等其他傳感器的輔助。
公路交通,本就是我們創造出的最復雜系統之一|Giphy
好消息是,如今,特斯拉通過算法優化,已經解決的智能剎車的問題。但在我們通向“真·自動駕駛”的路上,還有更多的奇特案例等待解決——公路交通,本就是我們創造出的最復雜系統之一。
參考文獻
[1] Duan R, Mao X, Qin A K, et al. Adversarial laser beam: Effective physical-world attack to dnns in a blink[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2021: 16062-16071.
[2]http://jst.tsinghuajournals.com/CN/rhhtml/20180417.htm#outline_anchor_8
[3]https://new.qq.com/rain/a/20220818A00WJL00
[4]https://www.youtube.com/watch?v=PRg5RNU_JLk
[5]https://equalocean.com/analysis/2022091918917 [6]https://thedriven.io/2021/07/13/it-can-see-dogs-the-big-reveal-from-teslas-radar-free-version-of-full-self-driving/
[7]https://www.jianshu.com/p/5ab134804d4c
[8]https://www.theguardian.com/technology/2016/jun/30/tesla-autopilot-death-self-driving-car-elon-musk
[9]https://blog.csdn.net/maopig/article/details/107961922
作者:睿悅
本文為澎湃號作者或機構在澎湃新聞上傳并發布,僅代表該作者或機構觀點,不代表澎湃新聞的觀點或立場,澎湃新聞僅提供信息發布平臺。申請澎湃號請用電腦訪問http://renzheng.thepaper.cn。



- 報料熱線: 021-962866
- 報料郵箱: news@thepaper.cn
互聯網新聞信息服務許可證:31120170006
增值電信業務經營許可證:滬B2-2017116
? 2014-2024 上海東方報業有限公司