- +1
交通設(shè)施|自動駕駛:交通規(guī)則的難題
遵循交通規(guī)則還不足以讓機(jī)器像人一樣開車。
工程師一直在推動自動駕駛汽車的使用。邏輯也很簡單:為汽車配備攝像頭和各類檢測器,跟蹤周圍所有物體,教車載計算機(jī)了解交通規(guī)則,讓它們自行導(dǎo)航到目的地。
這樣的想法大致合理,并不神奇,只是對人類駕駛的模仿。不過,機(jī)器駕駛無法模擬人類復(fù)雜的社交能力。譬如,無法與他人進(jìn)行眼神交流以確認(rèn)誰擁有通行權(quán),難以理解周邊車輛、行人的行為或手勢,因此常有一些愚蠢表現(xiàn)。這些交流示意難以用清晰明確描述,即使在人眼中很“簡單”,也隱藏著非常復(fù)雜的社交規(guī)則。

2016年冬,汽車進(jìn)入城市。澎湃新聞記者 周平浪 圖
社交互動的規(guī)則,是當(dāng)前阻礙自動駕駛實(shí)現(xiàn)的一個深坑。例如,人行橫道邊上,行人低頭看手機(jī),人類司機(jī)會根據(jù)自身的經(jīng)驗(yàn),來判斷此人是站在原地不動,還是心不在焉邊看手機(jī)邊準(zhǔn)備過馬路;而機(jī)器駕駛難以對此作出判斷。即便機(jī)器駕駛能夠判斷這類場景,也難免滑入被路人故意設(shè)好的社交陷阱。這已被諸多試驗(yàn)證明。
兩年多前,筆者在寫“為什么要發(fā)展無人駕駛車輛”一文時,自動駕駛還是風(fēng)險投資寵兒。兩年后,不確定的大部分事項(xiàng)已基本確定。還不確定的事項(xiàng)也已清晰,且屈指可數(shù)。兩年前的不確定因素,是當(dāng)時有限能力的檢測器和算力導(dǎo)致,雖然現(xiàn)在沒有完全解決,但隨著時間推進(jìn),遲早都能解決。剩下的只是性價比的競爭而已。
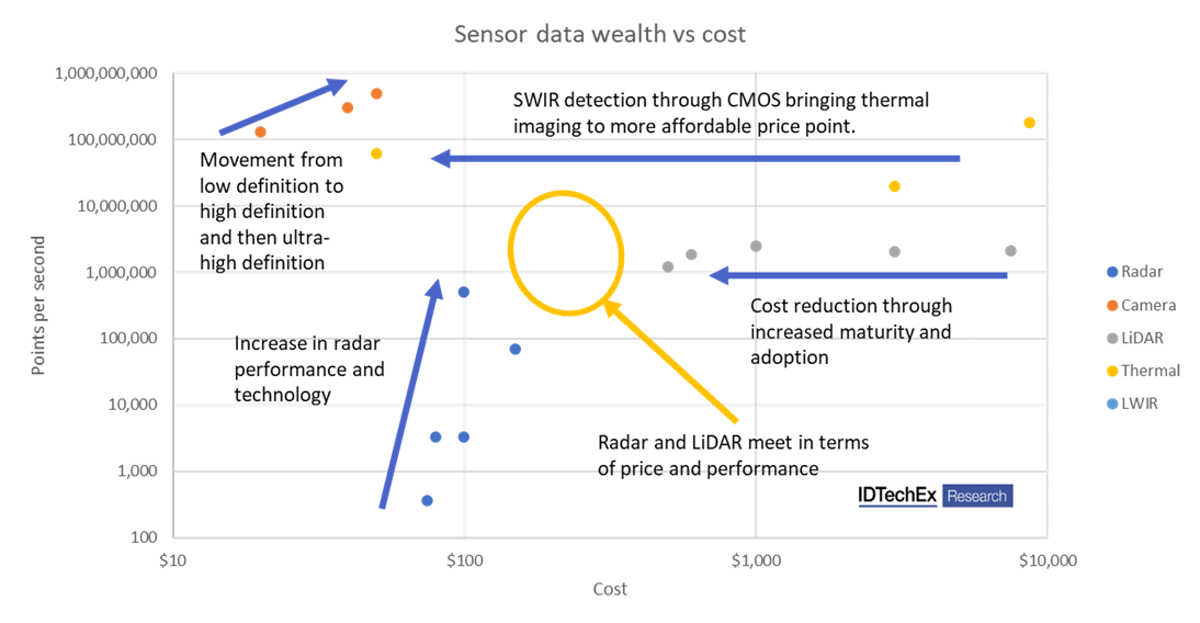
自動駕駛車輛各類檢測器的數(shù)據(jù)質(zhì)量與費(fèi)用比較的趨勢,
source:Autonomous Cars, Robotaxis & Sensors 2022-2042,Dr James Jeffs,2021.8
因此,制造檢測器、計算芯片、自動駕駛組件的公司,這兩年已取代自動駕駛整車公司,成為資本寵兒。許多人已把自動駕駛行業(yè)類比為手機(jī)行業(yè)。在手機(jī)行業(yè)里,要么成為有生態(tài)圈的蘋果、谷歌等,要么成為做芯片、重要元器件的供貨商,否則,只能賺點(diǎn)組裝廠的微薄利潤。即便打著高科技旗號,也改變不了以擺弄螺絲刀為核心技術(shù)的角色。
也許,自動駕駛的產(chǎn)業(yè)格局,已經(jīng)快要成型了。
人類司機(jī)和自動駕駛車輛遵守交通規(guī)則的過程
自動駕駛車輛的種類很多。有常見的小汽車、出租車、公共汽車,還有這幾年成為投資重點(diǎn)的貨車、外賣快遞投遞車和農(nóng)用機(jī)械拖拉機(jī)等。凡是公共道路上使用的運(yùn)載工具,大致都可歸入自動駕駛車輛(vehicles)。
公共道路上場景的不確定性和其數(shù)量的無盡性,迫使自動駕駛車輛不能像普通的自動化機(jī)械一樣,設(shè)定好確定的場景,按照固有流程解決。場景的即時性和多樣性,使得自動駕駛車輛遵守交通規(guī)則,也必須經(jīng)過和人類司機(jī)一樣的過程,也即:發(fā)現(xiàn) -> 理解 -> 決策 -> 行動。用自動駕駛車輛的語言來翻譯,則為:探測到(sensing)、理解(perception)、地圖重構(gòu)(mapping)、行為規(guī)劃(planning)、行駛(piloting)。交通規(guī)則和社交的作用,通常出現(xiàn)在這個過程中的理解(perception)、地圖重構(gòu)(mapping)、行為規(guī)劃(planning)三個環(huán)節(jié)。
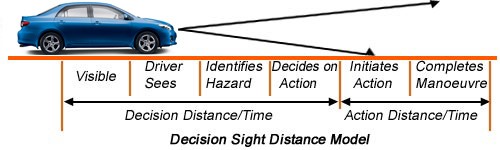
人類司機(jī)和自動駕駛車輛反應(yīng)過程的對比:(a)人類司機(jī)的反應(yīng)過程

人類司機(jī)和自動駕駛車輛反應(yīng)過程的對比:(b)自動駕駛車輛的“反應(yīng)”過程
自動駕駛車輛對現(xiàn)實(shí)世界規(guī)則的理解方式
自動駕駛車輛對現(xiàn)實(shí)世界的理解,是基于對周邊環(huán)境的探測,通過探測、理解得出判斷結(jié)論,譬如所在位置,是市中心還是郊區(qū),是交叉口、停車場還是路段,當(dāng)前路段限速是多少,等等。
對現(xiàn)實(shí)世界的規(guī)則理解,相當(dāng)于設(shè)定好自動駕駛車輛使用的交通規(guī)則。不過,仍然存在一些行為,自動駕駛車輛雖能探測,但難以理解其規(guī)則。譬如有后車或?qū)ο蜍囕v頻繁切換近光燈遠(yuǎn)光燈形成閃爍的提醒,或前車后窗貼著“我是新手”、“Baby in car”等文字表達(dá)的規(guī)則需求。

2021年,國內(nèi)發(fā)生了幾起L2級別自動駕駛車輛在高速公路的交通事故。其中一起,是在施工作業(yè)區(qū)撞到施工車輛;還有一起,是追尾撞上一輛開得較慢的貨車。其問題應(yīng)該都出在“理解”上。自動駕駛不能理解施工作業(yè)區(qū)是什么,不能理解跟在開得慢的貨車后會追尾。
具體說來,自動駕駛車輛安裝的許多檢測器,采集到的數(shù)據(jù)并不是實(shí)體,只是散點(diǎn)或圖片。這無數(shù)的散點(diǎn)和圖片,需通過處理,才能對應(yīng)可被機(jī)器理解的實(shí)體,如障礙物、車輛、行人、標(biāo)志、標(biāo)線等。而將散點(diǎn)變成實(shí)體,這項(xiàng)“理解”的工作,當(dāng)下大部分由專業(yè)廠商供貨的組件完成。今年在高速公路上發(fā)生事故的兩輛車,雖然整車廠商不同,剛好用的是同一家供貨商的組件。這些不常見的道路元素,未曾讓這些組件識別過,機(jī)器自然無法將探測到的散點(diǎn)“理解”為交通錐、貨車尾部。
要改正這樣的問題,當(dāng)前對自動駕駛車輛來說,并不算難。而如果交通規(guī)則出現(xiàn)太多變化,對自動駕駛是難題,對人類司機(jī)也同樣是難題。
譬如,國內(nèi)施工作業(yè)區(qū)雖已有許多規(guī)范約束,但也在操作層面存在不同理解。經(jīng)常會遇到這種情況,許多未經(jīng)培訓(xùn)的基層人員,根本不了解規(guī)范和技術(shù)要求,按自己的理解,擺出各種“花式”施工作業(yè)區(qū)。
交通規(guī)則的統(tǒng)一,要體現(xiàn)為交通控制設(shè)施的統(tǒng)一。當(dāng)前各類“花式”的交通設(shè)施,如彩色斑馬線、彩虹標(biāo)線、隧道燈光誘導(dǎo)等,充滿歧義,形成干擾,即便專業(yè)工作者也難以分清其含義,何況自動駕駛車輛。
例如,路上的誘導(dǎo)燈,無特殊事件發(fā)生時也會閃爍,形成的視覺污染和心理壓迫,對人類司機(jī)無疑是干擾,既沒有傳遞有效信息,還增加駕駛?cè)蝿?wù)的負(fù)擔(dān),使其判斷容易出錯。對自動駕駛的影響也同樣巨大,機(jī)器不得不在一堆混亂的光線中,提取信息含義,分辨閃爍原因。
這樣的做法,會混淆人們對閃爍含義的理解。路側(cè)不停閃爍,到底是有事情發(fā)生,還是上了個花式交通設(shè)施,刷刷存在感?如果沒事路側(cè)就閃爍,那些停在路邊打雙跳燈的車輛,還能傳遞出“有事發(fā)生”的信息嗎,路上還會安全嗎?
自動駕駛車輛對現(xiàn)實(shí)世界的理解,是模擬人類司機(jī)對現(xiàn)實(shí)世界的理解而形成的。路上規(guī)則如果出現(xiàn)邏輯混亂,聰明人或許可以取巧猜到,而自動駕駛車輛只是機(jī)器,并無靈機(jī)一動的可能,無法逾越規(guī)則歧義導(dǎo)致的混亂深坑。因此發(fā)生事故也是可預(yù)期的。
當(dāng)前急需的,是統(tǒng)一交通控制設(shè)施的規(guī)則和使用,如交通標(biāo)志、標(biāo)線、信號燈等這些設(shè)施,使其邏輯合理且容易閱讀識別,有效傳達(dá)交通規(guī)則信息。
只有路上的規(guī)則清晰、明確且統(tǒng)一,才會為人類駕駛或自動駕駛的安全提供保障。
source: How AI Improves Radar Perception for Autonomous Vehicles,NVIDIA DRIVE Labs, 2021.4(01:26)
自動駕駛車輛使用的地圖,和人類使用的地圖不同。機(jī)器不會去了解與其任務(wù)無關(guān)的信息,不會關(guān)心偶遇的飯店、公園這些人類覺得有趣的地方。但是,機(jī)器需要知道:自己在哪里,在哪條車道上;障礙物有哪些,離自己多遠(yuǎn);周邊車輛或行人的下一步趨勢是什么;當(dāng)前應(yīng)該遵守哪些交通規(guī)則,規(guī)則是什么樣的,等等。
因此,自動駕駛地圖是實(shí)時的距離地圖。對汽車來講,關(guān)心的是當(dāng)前車道和交通規(guī)則;對投遞車來講,關(guān)心的是當(dāng)前人行道和規(guī)則。
每家自動駕駛車輛廠商,都有自己的地圖解決方案。有些選擇先詳細(xì)測量再實(shí)時添加信息的方式,形成自動駕駛地圖;而有些主要利用探測設(shè)備實(shí)時生成構(gòu)建自動駕駛地圖。早幾年被認(rèn)為有前景的自動駕駛地圖產(chǎn)業(yè),現(xiàn)在差不多被包含在自動駕駛車輛廠商里,沒法獨(dú)立存在。也許過幾年還會變,誰知道呢?
自動駕駛車輛的地圖重構(gòu),即是交通規(guī)則在實(shí)時地圖的具象化,也是對其他用路人基于規(guī)則的短時趨勢預(yù)測,為自身行為的決策規(guī)劃做基礎(chǔ)。譬如,在進(jìn)入一個交叉口的過程中,自動駕駛車輛要判斷探測到的所有實(shí)體,哪些是障礙物,哪些是用路人,還有通過標(biāo)志標(biāo)線信號燈形成當(dāng)前的交通規(guī)則。
在與交通規(guī)則相關(guān)的交通控制設(shè)施中,標(biāo)線差不多是最普遍也最重要的設(shè)施,無論對人類司機(jī)還是對自動駕駛車輛。可惜,我國的交通標(biāo)線實(shí)際應(yīng)用技術(shù)上仍存在許多缺憾,難以對開車形成較好的支持。
譬如,一到下雨天,就看不清標(biāo)線,也分不清車道,下雨天的事故或擁堵,一多半可以怪在標(biāo)線上;又譬如,路上經(jīng)常出現(xiàn)左邊是黃線,右邊也是黃線,而司機(jī)對黃線的理解是分隔對向交通流,而兩邊都是黃線,司機(jī)就會懷疑自己是不是跑錯車道;或者,到了交叉口前,由于入口車道增加,原來連續(xù)的縱向標(biāo)線斷掉了,該怎么走,通行權(quán)在哪里,缺乏清晰的指示。
路上大部分交通規(guī)則,是用標(biāo)線表達(dá)。每一條標(biāo)線都有含義,自動駕駛車輛需要識別出來,并添加到自動駕駛地圖,構(gòu)建出規(guī)則地圖。有規(guī)則,才能預(yù)測他人的行為,才能決定自身行為。這是人類的開車邏輯,也是機(jī)器開車的邏輯。
在規(guī)則基礎(chǔ)上,預(yù)測他人的短時趨勢,這是地圖重構(gòu)要做的。預(yù)測趨勢,對機(jī)器的挑戰(zhàn),遠(yuǎn)比人類要大。人類在駕駛中,一眼可以看清誰會影響到自己;而機(jī)器駕駛,要對所有探測到的車輛、行人等編好號,根據(jù)規(guī)則來預(yù)測這些實(shí)體的下一步路徑。對在車道里行走的車輛,則是通過車道的規(guī)則來判斷,譬如左轉(zhuǎn)車道的車輛應(yīng)該會向左轉(zhuǎn),右轉(zhuǎn)車道的向右轉(zhuǎn);路段上打著轉(zhuǎn)向燈的車輛,則打算換車道行駛,等等。
不過,萬一碰到人用手勢、眼神或文字來表達(dá)的協(xié)商,譬如微微點(diǎn)頭或友好微笑,禮讓別的車先走,則會難倒機(jī)器駕駛。因?yàn)椋@些手勢、眼神、文字包含當(dāng)?shù)厣缃晃幕蛐袨樗幍谋尘昂x。目前,一些自動駕駛車輛已看得懂停車的指揮手勢,但還沒有車輛能看懂人的眼神交流,或一些微小動作的含義。幸好,眼神交流協(xié)商通行權(quán)的場景,通常出現(xiàn)在停下時,看不懂的后果,多半只是延遲一會兒,沒有太多安全上的問題。
當(dāng)前有許多車輛廠商放出在國內(nèi)測試自動駕駛的視頻。有時會看到壓標(biāo)線實(shí)線的場景,也會看到交叉口轉(zhuǎn)彎時軌跡不合理越過中心實(shí)線的場景。這些視頻中的違反交通規(guī)則行為,雖然大部分不嚴(yán)重,但足以說明,其在自動駕駛地圖重構(gòu)時,放棄了對一些交通規(guī)則的嵌入。這也許是由于當(dāng)時當(dāng)?shù)亟煌ㄒ?guī)則本身不合理,也許是廠商在國內(nèi)測試時不理解交通控制設(shè)施的重要性,從而忽視了規(guī)則地圖的完整性。不過,在這樣環(huán)境下測試出的車輛,會不會給用戶帶來罰單或惹事呢?
一些自動駕駛廠商對這些避而不談,把話題引到智能網(wǎng)聯(lián)或車路協(xié)同,以解決自動駕駛能力不足。但是,規(guī)則如果缺失,唯一方法是補(bǔ)齊規(guī)則,標(biāo)線斷了劃標(biāo)線,標(biāo)志丟了立標(biāo)志,加上一大堆貌似高科技的設(shè)備也不能找回規(guī)則。
自動駕駛車輛行為規(guī)劃過程中的規(guī)則考量
行動規(guī)劃的前提是安全,自身安全和他人安全,這對人和機(jī)器都一樣。
除確保安全以外,行駛的意圖和通行權(quán)(right of way)是其他兩個約束條件。例如,在交叉口打算右轉(zhuǎn)彎,這是行駛意圖;判斷自己是否在右轉(zhuǎn)彎車道或最右側(cè)車道,信號燈或標(biāo)志是否允許右轉(zhuǎn)彎,行駛路徑上有沒有行人或非機(jī)動車等,這是通行權(quán)是否獲得的判斷。然后,在確保安全和獲得通行權(quán)的前提下,根據(jù)意圖規(guī)劃下一步行為,即右轉(zhuǎn)彎。
在規(guī)劃行為的過程中,自動駕駛車輛需要納入計算的,不僅是明確的規(guī)則以描述安全和通行權(quán)問題,還包括隱形的規(guī)則,參與到安全與否、通行權(quán)獲得與否的判斷過程。
明確的規(guī)則,通常是以標(biāo)志、標(biāo)線、信號燈表示,司機(jī)或機(jī)器一看就明白。而隱形的規(guī)則,則是開車社會習(xí)俗和文化形成的。譬如,即便有通行權(quán),司機(jī)也不會做那些明知可以避讓,卻貿(mào)貿(mào)然撞行人、非機(jī)動車的行為。針對這些隱形的規(guī)則,有些廠商(Mobileye等)提出幾條行為規(guī)劃安全原則,大致可用文字說明如下(具體規(guī)則用數(shù)學(xué)和物理公式描述):
規(guī)則 1. 不要撞到前面的車(保持縱向距離);
規(guī)則 2. 不要魯莽的切入其他車道(保持橫向距離);
規(guī)則 3. 獲得通行權(quán)并不是通行的全部條件;
規(guī)則 4. 低能見度或者視距遮擋視線不佳的區(qū)域,要遵守防御性駕駛原則;
規(guī)則 5. 如果能規(guī)避車禍且不引起其他事故,必須采取規(guī)避行為。
這些自動駕駛車輛認(rèn)為的隱形規(guī)則,只是人類社會開車時默認(rèn)的社交禮儀,譬如跟車需要保持兩三秒的車距,避免急剎后追尾這樣的默認(rèn)規(guī)則。這些規(guī)則,已被自動駕駛車輛廠商采用。
實(shí)際上,不同廠商采用不同的隱性規(guī)則,總體會比這些更多。無論哪個國家或地區(qū),紙面上的交通規(guī)則,要遠(yuǎn)少于大家認(rèn)可約定俗成的規(guī)則。這也是自動駕駛曾經(jīng)或正在面臨的規(guī)則困境。默認(rèn)規(guī)則有哪些,需要在各地實(shí)踐中逐步添加。
source: Implementing the RSS Model on NHTSA Pre-Crash Scenarios,Mobileye an Intel Company,2019(02:42)
 無論對人還是機(jī)器,規(guī)則都不應(yīng)含糊,不應(yīng)缺失細(xì)節(jié),造成邏輯上的歧義甚至混亂。如今路上的交通擁堵和事故,或許有些和規(guī)則含糊有關(guān)。
無論對人還是機(jī)器,規(guī)則都不應(yīng)含糊,不應(yīng)缺失細(xì)節(jié),造成邏輯上的歧義甚至混亂。如今路上的交通擁堵和事故,或許有些和規(guī)則含糊有關(guān)。這些含糊的交通規(guī)則,可能是因?yàn)樾麄魈伲灿锌赡苁菢?biāo)準(zhǔn)規(guī)范不嚴(yán)謹(jǐn),甚至有可能是學(xué)者自己也沒搞明白的原因。無論是哪種,都需要趕緊解決。
遵循交通規(guī)則雖然還不足以讓機(jī)器像人一樣開車,但交通規(guī)則含糊,則不足以讓所有人安全開車。
(作者郭敏系杭州交通工程師)



- 報料熱線: 021-962866
- 報料郵箱: news@thepaper.cn
互聯(lián)網(wǎng)新聞信息服務(wù)許可證:31120170006
增值電信業(yè)務(wù)經(jīng)營許可證:滬B2-2017116
? 2014-2024 上海東方報業(yè)有限公司